Руководство по использованию PIC16F877A для шаговых моторных проектов
Микроконтроллер PIC16F877A широко используется во многих электронных проектах, потому что он предлагает хороший баланс функций и простоты использования.В этом руководстве мы внимательно рассмотрим PIC16F877A, охватывая все, от моделей ее распины и CAD до его использования в управлении шагами.Создаете ли вы простое устройство или сложный проект автоматизации, понимая, как подключать и управлять двигателями с помощью этого микроконтроллера, поможет вам получить наилучшие результаты.
Каталог

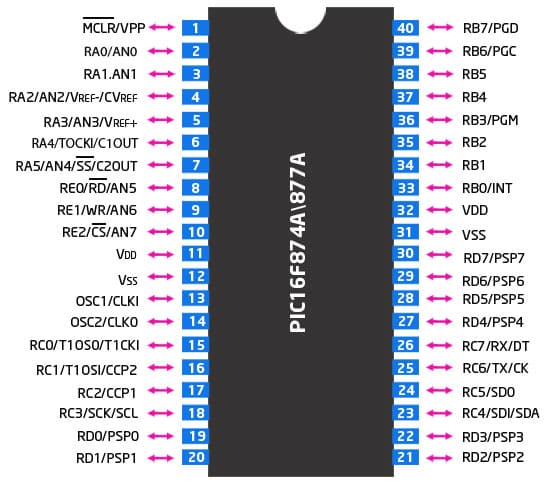
PIC16F877A Конфигурация PIN -конфигурации
Модели CAD для PIC16F877A
PIC16F877A Символ диаграммы
PIC16F877A PCB SOUTPRINT

3D -модель
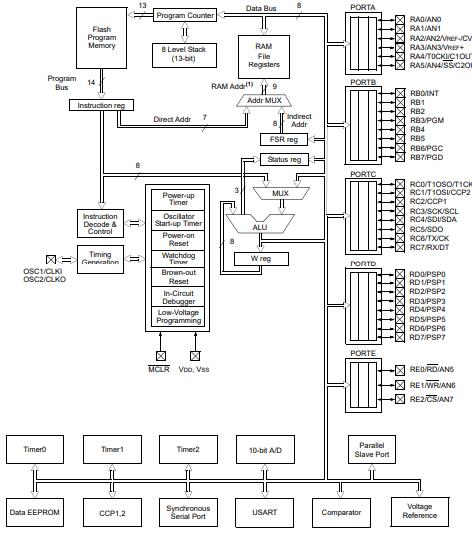
PIC16F877A Внутренняя структура
Подробные технические характеристики
| Тип | Параметр |
| Время выполнения завода | 7 недель |
| Устанавливать | Через дыру |
| Монтажный тип | Через дыру |
| Пакет / корпус | 40-DIP (0,600, 15,24 мм) |
| Количество булавок | 40 |
| Преобразователи данных | A/D 8x10b |
| Количество I/OS | 33 |
| Сторожевые таймеры | Да |
| Рабочая температура | -40°C ~ 85°C TA |
| Упаковка | Трубка |
| Ряд | Картинка® 16f |
| Опубликовано | 1997 |
| Код JESD-609 | E3 |
| PBFREE CODE | Да |
| Статус частично | Активный |
| Уровень чувствительности влаги (MSL) | 1 (неограниченный) |
| Количество терминаций | 40 |
| Код ECCN | Ear99 |
| Терминальная отделка | Матовая олова (SN) - отожжен |
| Дополнительная функция | Работает при минимальном поставке 4 В |
| Терминальная позиция | Двойной |
| Напряжение снабжения | 5 В |
| Частота | 20 МГц |
| Базовый номер детали | PIC16F877A |
| Подсчет штифтов | 40 |
| Поставка напряжения-макс (VSUP) | 5,5 В. |
| Питания | 5 В |
| Поставка напряжения мимин (VSUP) | 4,5 В. |
| Интерфейс | I2c, spi, ssp, uart, usart |
| Размер памяти | 14 КБ |
| Тип генератора | Внешний |
| Номинальный ток снабжения | 1,6 мА |
| Размер оперативной памяти | 368 x 8 |
| Напряжение - Поставка (VCC/VDD) | 4 В ~ 5,5 В. |
| UPS/UCS/Периферический тип ICS | Микроконтроллер, RISC |
| Основной процессор | Картинка |
| Периферийные устройства | Brown-Out Detect/Reset, POR, PWM, WDT |
| Тип памяти программы | ВСПЫШКА |
| Размер ядра | 8-битный |
| Размер памяти программы | 14 КБ (8K x 14) |
| Подключение | I2c, spi, uart/usart |
| Размер бита | 8 |
| Время доступа | 20 µс |
| Имеет АЦП | Да |
| Каналы DMA | Нет |
| Ширина шины данных | 8B |
| Количество таймеров/счетчиков | 3 |
| Адреса ширины шины | 8B |
| Плотность | 112 КБ |
| Eeprom размер | 256 x 8 |
| Семья процессоров | Картинка |
| Количество каналов ADC | 8 |
| Количество каналов ШИМ | 2 |
| Количество каналов I2C | 1 |
| Высота | 4,06 мм |
| Длина | 52,45 мм |
| Ширина | 14,22 мм |
| Достичь SVHC | Нет SVHC |
| Радиационное упрочнение | Нет |
| Статус ROHS | ROHS3 соответствует |
| Свободно привести | Свободно привести |
Понимание шаговых двигателей
Шаповый двигатель - это тип электродвигателя, который движется в определенных шагах, а не в непрерывном движении, как традиционные двигатели.Эти пошаговые движения измеряются в градусах, которые могут варьироваться в зависимости от применения.
Шаповые двигатели могут работать в разных режимах: волновой диск, полный диск и половина привода.Каждый режим контролирует, как моторные фазы включены, влияя на его производительность и делает его подходящим для различных видов использования.
В режиме волнового привода только одна фаза двигателя питается за раз.Этот простой режим управления полезен для ситуаций, когда эффективность электроэнергии приоритета в отношении крутящего момента, например, в базовых задачах автоматизации, где необходим минимальный начальный ток.
Полный режим привода способствует двум фазам одновременно.Это приводит к более высокой мощности крутящего момента, когда две катушки работают вместе, что делает его идеальным для приложений, где необходима точность и прочность, например, в робототехнике и технике ЧПУ.
Половина режима привода объединяет функции как волны, так и полного привода, попеременно заряжая одну фазу и две фазы.Этот подход обеспечивает меньшие размеры шагов, эффективно удваивая разрешение двигателя.Половина диска лучше всего подходит для таких приложений, как 3D -печать и тонкие инструменты, где важны плавное движение и точное расположение.
При выборе шагового двигателя для конкретного использования рассмотрите операционную среду.Для высоких задач рекомендуется половина привода режима для обеспечения плавных переходов и уменьшения вибраций.Для проектов, ориентированных на экономию энергии, режим волнового привода может быть более подходящим.
Выбор правильного режима требует балансировки таких факторов, как крутящий момент, скорость и сложность системы.Выбор правильного режима может значительно повлиять на производительность двигателя и общую эффективность вашей системы.
Соединение шагового мотора с PIC16F877A
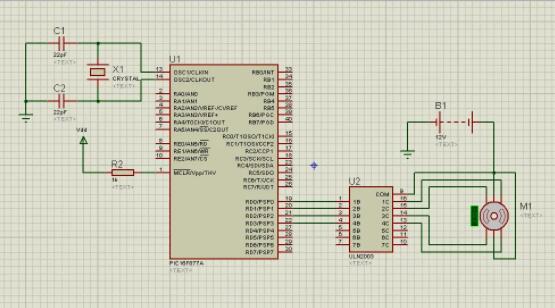
Чтобы подключить шаговый двигатель с PIC16F877A Микроконтроллер, вы можете использовать транзисторную массив ULN2003.Эта интегрированная схема, разработанная для моторов с высоким точками, содержит семь пар Дарлингтона.Нижние биты Portd в микроконтроллере связаны с входными контактами (1b, 2b, 3b, 4b) ULN2003, в то время как его выводные контакты (1C, 2C, 3C, 4C) подключаются к штифтам шагового двигателя.Общие выводы двигателя и PIN -контакта ULN2003 подключены к источнику питания 12 В.
Шаповые двигатели обычно используются для приложений, которые требуют точного управления движением.Они преобразуют цифровые импульсы в механическое вращение, что делает их идеальными для таких устройств, как машины с ЧПУ и 3D -принтеры, где положение и скорость должны быть тщательно регулированы.
ULN2003 играет ключевую роль в управлении шаговыми двигателями из -за его способности обрабатывать высокий ток и его легкое взаимодействие с микроконтроллерами.При подключении к PIC16F877A нижние биты Portd используются для управления шагом.Эта конфигурация обеспечивает точное управление шагом, обеспечивая точное движение и позиционирование.
Использование ULN2003 в настройках управления двигателем очень надежно в реальных приложениях.Это помогает минимизировать такие проблемы, как пропущенные шаги или неправильное позиционирование, улучшая общую производительность.Регулярное техническое обслуживание и калибровка на основе данных об использовании может дополнительно оптимизировать моторную функцию, обеспечивая долгосрочную стабильность и точную работу.
Регулирующая скорость шагового двигателя
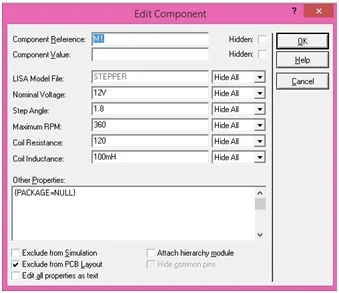
Скорость шагового двигателя может быть точно модифицирована с использованием программного обеспечения для моделирования Proteus.Доступ к настройкам двигателя через «Редактирующие свойства», можно сделать корректировки к таким параметрам, как количество шагов и угол шага.Например, 200-шаговый двигатель расщепляет полное вращение (360 °) на 200 шагов, что делает каждый шаг 1,8 °.Изменение этих настроек в Proteus будет динамически отражать во время моделирования.
На практике шаговые двигатели часто используются в отраслях, где точный контроль над движением имеет решающее значение, например, в машине с ЧПУ и робототехникой.Регулирование угла ступенчата и количество ступеней.
Изменение параметров шагового двигателя влияет на характеристики производительности, такие как крутящий момент и разрешение.Например, увеличение количества этапов обычно увеличивает разрешение, но может влиять на крутящий момент и время отклика.Понимание этих компромиссов посредством моделирования помогает принимать обоснованные решения.
Нюансированная перспектива показывает, что итеративные корректировки, за которыми следуют практические испытания, приводят к более надежной конструкции двигателя.Обеспечение того, чтобы цифровые симуляции тщательно отражали реальные результаты, имеет решающее значение.Нюансы настройки шагового двигателя действительно заключаются в балансе между теоретической точностью и практической осуществимостью.
Программирование шагового двигателя с PIC16F877A
В этом разделе рассказывается о том, как запрограммировать шаговый двигатель с использованием микроконтроллера PIC16F877A, объясняя различные режимы вождения и обеспечивая практическое руководство для эффективной реализации.
Вот базовый пример кода для демонстрации управления двигателем шагового двигателя с помощью режима полного привода:
void main ()
{
Трисд = 0B00000000;// Установить Portd в качестве выходного
Portd = 0b11111111;// инициализировать Portd
делать
{
Portd = 0B00000011;// заряжайте два этапа одновременно
Dolement_ms (500);// 0,5-секундная задержка
Portd = 0B00000110;
Dolement_ms (500);
Portd = 0b00001100;
Dolement_ms (500);
Portd = 0B00001001;
Dolement_ms (500);
} while (1);// петля на неопределенный срок
}
В этом коде порт PIC16F877A настроен в качестве выходного порта для управления двигателем Stepper через драйвер ULN2003.Последовательность команд заряжает две фазы шагового двигателя за раз, что характерно для режима полного привода.Этот режим удерживает ротор в фиксированном положении с максимальным крутящим моментом, но обычно потребляет больше мощности.
Полный режим привода - не единственный способ управления шаговыми двигателями.Волновой диск и половина режимов привода обеспечивают альтернативы на основе конкретных требований.Волновой привод заряжает только одну фазу за раз, что снижает энергопотребление, но приводит к более низкому крутящему моменту.Половина движения чередуются между одним и двумя фазами, предлагая более высокое разрешение и более плавное движение.
При программировании шаговых двигателей выберите режим вождения, который наилучшим образом соответствует вашим потребностям, будь то для точного позиционирования, эффективности питания или максимального крутящего момента.
Практическое применение шаговых двигателей
Шатовые двигатели широко используются во многих отраслях из -за их способности обеспечивать точный контроль и надежную производительность.Их универсальность делает их подходящими для всего, от автомобилей и бытовых приборов до промышленных машин и медицинских устройств.
В автомобильном мире шаговые двигатели играют ключевую роль в управлении системами, такими как дроссельная заслонка, фары и кондиционер.Они помогают тонко настроить эти компоненты, следя за тем, чтобы транспортные средства работали гладко и эффективно.Между тем, в офисном оборудовании, как принтеры и фотокопиры, шаговые двигатели выполняют задачи, такие как кормление бумаги и размещение чернил.Эта точность обеспечивает последовательное качество печати и плавную работу с течением времени.
Дома, такие приборы, как стиральные машины и посудомоечные машины, полагаются на шаговые двигатели для контроля потока воды и вращения барабана, обеспечивая плавную функционирование.В промышленных условиях шаговые двигатели имеют решающее значение для эксплуатационных машин с ЧПУ и роботизированными руками, где они предоставляют точные движения, необходимые для высокого производства.
Системы безопасности также извлекают выгоду из надежного движения шаговых двигателей.В таких устройствах, как камеры наблюдения и автоматизированные замки, шаговые двигатели обеспечивают плавное и точное позиционирование, что важно для эффективного мониторинга и безопасности.В здравоохранении шаговые двигатели используются в медицинских устройствах, таких как инфузионные насосы и оборудование для визуализации, где они предлагают точный контроль, необходимый для безопасной и точной работы.
Поскольку технология продолжает развиваться, ожидается, что шаговые двигатели найдут еще большее применение в развивающихся областях, таких как робототехника и автономные транспортные средства.Их дальнейшее развитие, вероятно, приведет к еще большей точности и эффективности, расширяя их роль в различных отраслях.
Сопоставимые детали микроконтроллера
| Номер части | PIC16F877A-I/P. | PIC16F77-I/P. | PIC16F74-I/P. | PIC16F777-I/P. |
| Производитель | Технология микрочипа | Технология микрочипа | Технология микрочипа | Технология микрочипа |
| Пакет / корпус | 40-DIP (0,600, 15,24 мм) | 40-DIP (0,600, 15,24 мм) | 40-DIP (0,600, 15,24 мм) | 40-DIP (0,600, 15,24 мм) |
| Количество булавок | 40 | 40 | 40 | 40 |
| Ширина шины данных | 8 б | 8 б | 8 б | 8 б |
| Номер в/вывода | 33 | 33 | 33 | 36 |
| Интерфейс | I2c, spi, ssp, uart, usart | I2c, spi, ssp, uart, usart | I2c, spi, ssp, uart, usart | I2C, SPI, UART, USART |
| Размер памяти | 14 КБ | 7 кб | 14 КБ | 14 КБ |
| Напряжение снабжения | 5 В | 5 В | 5 В | 5 В |
| Периферийные устройства | Brown-Out Detect/Reset, POR, PWM, WDT | Brown-Out Detect/Reset, POR, PWM, WDT | Brown-Out Detect/Reset, POR, PWM, WDT | Brown-Out Detect/Reset, POR, PWM, WDT |
| Посмотреть сравнение | PIC16F877A-I/P. ПРОТИВ PIC16F77-I/P. | PIC16F877A-I/P. ПРОТИВ PIC16F77-I/P. | PIC16F877A-I/P. ПРОТИВ PIC16F74-I/P. | PIC16F877A-I/P. ПРОТИВ PIC16F777-I/P. |
Часто задаваемые вопросы [FAQ]
1. Что использует шаговый двигатель для генерации механического движения?
Шаповый двигатель генерирует механическое движение с использованием электрических импульсов.
2. Что делает шаговый мотор?
Шаповый двигатель движется в отдельных шагах.
3. Как измеряются шаговые двигатели?
Шаповые двигатели измеряются в градусах.
4. Сколько шагов предпринимает шаговый мотор?
Шаповый двигатель движется по шагам за один раз.
5. Сколько режимов возбуждения имеет шаговый мотор?
Шаповый двигатель имеет три режима возбуждения.
6. Как самый простой способ подключить шаговый двигатель?
Самый простой способ - подключить его к микроконтроллеру PIC16F877A.
7. Сколько входных штифтов ULN2003 подключены к самым низким значимым битам порта микроконтроллера?
Четыре входных контакта подключены к самым низким значимым битам Portd Microcontroller
О нас
ALLELCO LIMITED
Прочитайте больше
Быстрое запрос
Пожалуйста, отправьте запрос, мы ответим немедленно.
Почему выбирают чип памяти Adesto RM25C64DS-Ltai-B для вашего проекта?
на 2024/10/10
PC817 Optocoupler: функциональность и современные приложения
на 2024/10/10
Популярные посты
-
Что такое GND в цепи?
на 1970/01/1 2838
-

Руководство по разъемам RJ-45: Цветовые коды разъема RJ-45, схемы проводки, приложения R-J45, листы RJ-45
на 1970/01/1 2409
-

Типы разъемов волокна: SC VS LC и LC VS MTP
на 1970/01/1 2019
-
Понимание напряжений питания в электронике VCC, VDD, VEE, VSS и GND
на 0400/11/5 1766
-

Сравнение DB9 и RS232
на 1970/01/1 1726
-

Что такое батарея LR44?
Электричество, эта вездесущая сила, тихо пронизывает все аспекты нашей повседневной жизни, от тривиальных гаджетов до опасного для жизни медицинского оборудования, он играет тихую роль.Тем не менее, по -настоящему ухв...на 1970/01/1 1679
-
Понимание основ: сопротивление индуктивности, и успеваемость
В запутанном танце электротехники трио фундаментальных элементов занимает центральное место: индуктивность, сопротивление и емкость.Каждый носит уникальные черты, которые определяют динамические ритмы электронных ...на 1970/01/1 1621
-

Комплексное руководство по батарее CR2430: Технические характеристики, применения и сравнение с батареями CR2032
Что такое батарея CR2430?Преимущества батарей CR2430НормCR2430 Аккумуляторные приложенияCR2430 эквивалентCR2430 против CR2032Батарея CR2430 РазмерЧто искать при покупке CR2430 и эквивалентахЛист данных PDFЧасто задаваемые вопросы Батареи ...на 1970/01/1 1495
-

CR2450 против CR2032: можно ли использовать батарею?
Литиевые марганцевые батареи имеют некоторое сходство с другими литийными батареями.Высокая плотность энергии и длительный срок службы - это характеристики, которые они обладают общими.Этот вид батареи завоевал дове...на 1970/01/1 1471
-
Что такое RF и почему мы его используем?
Технология радиочастотной (RF) является ключевой частью современной беспроводной связи, что позволяет передавать данные на большие расстояния без физических соединений.Эта статья углубляется в основы РФ, объясняя, ка...на 1970/01/1 1454
Горячий номер детали
-
06033AR75CAT2A
KYOCERA AVX
CAP CER 0.75PF 25V NP0 0603
06032C821KAT2A
KYOCERA AVX
CAP CER 820PF 200V X7R 0603
NCP81071ADR2G
onsemi
IC GATE DRVR LOW-SIDE 8SOIC
74F899QC
onsemi
IC TXRX NON-INVERT 5.5V 28PLCC
IHLP3232DZER2R2M01
Vishay Dale
FIXED IND 2.2UH 10.5A 13.7 MOHM
IR5001S
Infineon Technologies
IC OR CTRLR N+1 8SOIC
HUFA76413P3
onsemi
MOSFET N-CH 60V 23A TO220-3
CD4041UBF3A
Texas Instruments
CMOS QUAD TRUE/COMPLEMENT BUFFER
TNY276PN
Power Integrations
IC OFFLINE SWITCH FLYBACK 8DIP
LT3495BEDDB-1#TRMPBF
Analog Devices Inc.
IC REG BST SEPIC ADJ 275MA 10DFN
AN8045M
Panasonic Electronic Components
IC REG LINEAR 4.5V 50MA 3HSIP
NCV8440ASTT3G
onsemi
MOSFET N-CH 59V 2.6A SOT223
ISL6558CRZ-T
Intersil
SWITCHING CONTROLLER, VOLTAGE-MO
ADG741BKSZ-REEL7
Analog Devices Inc.
IC SWITCH SPST-NOX1 3OHM SC70-6
LQH88PN2R2N38L
Murata Electronics
FIXED IND 2.2UH 6.4A 9 MOHM SMD
AD5667RBCPZ-R2
Analog Devices Inc.
IC DAC 16BIT V-OUT 10LFCSP
CRCW0805130RJNEA
Vishay Dale
RES SMD 130 OHM 5% 1/8W 0805
C1210C224M5RACTU
KEMET
CAP CER 0.22UF 50V X7R 1210 -

PDTA123YU115
Nexperia USA Inc.
PDTA123Y SERIES - PNP RESISTOR-E
CL21C121JBANNNC
Samsung Electro-Mechanics
CAP CER 120PF 50V C0G/NP0 0805
SMDJ30A
Alpha & Omega Semiconductor Inc.
1CH 30V UNIDIRECTIONAL 3000W SMD
RT1206DRE07220RL
YAGEO
RES SMD 220 OHM 0.5% 1/4W 1206
GP1UE270RKVF
Sharp Microelectronics
SENSOR REMOTE REC 36.0KHZ 8M
LTC1727EMS8-5#PBF
Analog Devices Inc.
IC SUPERVISOR 3 CHANNEL 8MSOP
CL31B224KACWPNC
Samsung Electro-Mechanics
CAP CER 0.22UF 25V X7R 1206
74ACT163SJX
onsemi
IC BINARY COUNTER 4-BIT 16SOP
BTS5662E
Infineon Technologies
IC LED DRIVER REGULATOR 24A
BD71850MWV-E2
Rohm Semiconductor
BD71850MWV INTEGRATES ALL POWER
NR3010T4R7M
Taiyo Yuden
FIXED IND 4.7UH 780MA 228MOHM SM
SN74276N
Texas Instruments
J-K FLIP-FLOP
OV00660-A56G
OmniVision Technologies Inc
IC IMAGE SENSOR 56-WLCSP
PMF8118TSR
Flex Power Modules
DC DC CONVERTER 0.8-1.8V 18W
MCH3377-TL-E
onsemi
SMALL SIGNAL FIELD-EFFECT TRANSI
LM2940CS-5.0
Texas Instruments
IC REG LIN 5V 1A DDPAK/TO263-3
CS5203-1GT3
onsemi
IC REG LINEAR POS ADJ 3A TO220-3
NZX13C,133
NXP Semiconductors
NOW NEXPERIA NZX13C - ZENER DIOD -

QTLP670CRYTR
Everlight Electronics Co Ltd
LED RED/YELLOW CLEAR 4PLCC SMD
BD82032FVJ-GE2
Rohm Semiconductor
IC PWR SWITCH N-CHAN 1:1 8TSSOP
TPS76132DBVR
Texas Instruments
IC REG LINEAR 3.2V 100MA SOT23-5
XH311HU-IV07E
Seiko Instruments
CAP 35MF 3.3V SURFACE MNT
PCM3002E/2KG4
Texas Instruments
IC STEREO CODEC 16/20BIT 24-SSOP
TB3100H-13-F
Diodes Incorporated
THYRISTOR 275V 400A DO214AA
S392D-HG3-08
Vishay General Semiconductor - Diodes Division
RF DIODE PIN 30V SOT23-3
AT90PWM1-16SU
Atmel
IC MCU 8BIT 8KB FLASH 24SOIC
STF21NM50N
STMicroelectronics
MOSFET N-CH 500V 18A TO220FP
NCV7517FTG
onsemi
IC MTR DRIVER 4.75V-5.25V 32LQFP
MCP4661-103E/ST
Microchip Technology
IC DGT POT 10KOHM 257TAP 14TSSOP
1N4754A
SMC Diode Solutions
DIODE ZENER 39V 1W DO41
SMCJ40CA
Littelfuse Inc.
TVS DIODE 40VWM 64.5VC DO214AB
GRM31A7U3A271JW31D
Murata Electronics
CAP CER 270PF 1KV U2J 1206
C1005NP01H821J050BA
TDK Corporation
CAP CER 820PF 50V NP0 0402
MAX211ECAI+T
Analog Devices Inc./Maxim Integrated
IC TRANSCEIVER FULL 4/5 28SSOP
9DBL0452BKILFT
Renesas Electronics America Inc
IC CLK BUFFER ZD 32-VFQFPN
VI-J31-MZ
Vicor Corporation
DC DC CONVERTER 12V 25W