MPU-6050 В действии: Практическое руководство по настройке, конфигурации и управлению шумом
Каталог
Введение в MPU-6050
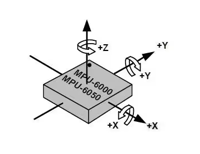
MPU-6050 является первым в мире интегрированным 6-осевым компонентом движения, который интегрирует 3-осевой гироскоп, 3-осевой акселерометр и масштабируемый цифровой процессор движения (DMP).Цель использования его состоит в том, чтобы получить угол наклона объекта, который будет измерен (например, квадрокоптер, балансирующий автомобиль) на оси x, y и z, то есть угол шага, угол рулона и угол рысканияПолемМы читаем шесть данных MPU-6050 (значение AD с тремя осевыми ускорением и значение AD в трех осевой угловой скорости) через интерфейс I2C.После обработки слияния осанки можно рассчитать углы шага, рулона и рыскания.В качестве направленного эталона для значений измерения определение направления координаты датчика, как показано на рисунке ниже, который следует по принципу правой системы координат (то есть правый большой палец указывает на положительное направление x-Ось, указательный палец указывает на положительное направление оси Y, а средний палец указывает на положительное направление оси Z).
Благодаря выделенной шине датчика I2C, MPU-6050 способен получать вход непосредственно от внешнего 3-осевого компаса, обеспечивая полный выход для 9-осевой MotionFusion ™.Это устраняет проблему несоответствия между комбинированным гироскопом и временной шкалой ускорителя и значительно уменьшает пространство упаковки по сравнению с многокомпонентными решениями.При подключении к трехосевому магнитометру MPU-60x0 способен обеспечить полный выход слияния движения на 9 осевых движений на свой основной порт I2C или SPI (обратите внимание, что порт SPI доступен только на MPU-6000).
Альтернативы и эквиваленты
• MPU-3300
• MPU-6000
• MPU-6500
Производитель MPU-6050
Производитель MPU-6050-TDK.После того, как два основателя TDK, доктор Йогоро Като и Takei Takei, изобрели феррит в Токио, они основали Токио Денкикагаку Когио К.К.В 1935 году. Как мировой бренд электроники, TDK всегда сохранял доминирующее положение в областях электронного сырья и электронных компонентов.Портфель продуктов TDK, основанный на инновациях, охватывает пассивные компоненты, такие как керамические конденсаторы, алюминиевые электролитические конденсаторы, пленочные конденсаторы, магнитные продукты, высокочастотные компоненты, пьезоэлектрические и защитные устройства, а также датчики и системы датчиков (такие как температура и давление, устройства, а также датчики и системы сенсоров (такие как температура и давление, устройства, а также датчики и системы сенсоров (такиеМагнитные и MEMS -датчики) и т. Д.Его бренды продуктов включают TDK, EPCOS, Invensense, Micronas, Tronics и TDK-Lambda.
Внутренняя блок-схема MPU-6050
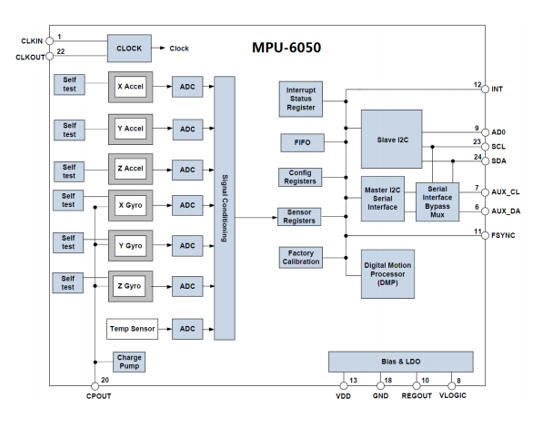
Среди них SCL и SDA-это интерфейсы IIC, соединенные с MCU, и MCU контролирует MPU-6050 через этот интерфейс IIC.Есть также интерфейс IIC, а именно aux_cl и aux_da.Этот интерфейс может использоваться для подключения внешних подчиненных устройств, таких как магнитные датчики, с образованием датчика девяти осевой.Vlogic - это напряжение порта io.Этот PIN -код может поддерживать минимум 1,8 В.Обычно мы подключаем его непосредственно к VDD.AD0 является штифтом управления адресом интерфейса подчиненного IIC (подключенного к MCU).Этот вывод контролирует самый низкий бит адреса IIC.Если он подключен к GND, адрес IIC MPU-6050 составляет 0x68;Если он подключен к VDD, это 0x69.Обратите внимание, что адрес здесь не включает в себя самый низкий бит передачи данных (самый низкий бит используется для представления операций чтения и записи).На MWBalancedStc15 AD0 подключен к GND, поэтому адрес IIC MPU-6050 составляет 0x68 (исключая самый низкий бит).
Инициализировать интерфейс IIC
MPU-6050 использует IIC для связи с STC15, поэтому нам нужно сначала инициализировать линии данных SDA и SCL, подключенные к MPU-6050.
Сброс MPU-6050
Этот шаг восстанавливает все регистры внутри MPU-6050 до их значений по умолчанию, что достигается путем написания 1 к 7-м из реестра управления питанием 1 (0x6b).После сброса реестр управления питанием 1 будет восстановлен до значения по умолчанию (0x40), и этот регистр должен впоследствии быть установлен на 0x00, чтобы разбудить MPU-6050 и поместить его в обычное рабочее состояние.
Установите полномасштабный диапазон датчика угловой скорости (гироскоп) и датчика ускорения
На этом этапе мы устанавливаем полномасштабный диапазон (FSR) двух датчиков через регистр конфигурации гироскопа (0x1b) и регистр конфигурации датчика ускорения (0x1c) соответственно.Как правило, мы устанавливаем полномасштабный диапазон гироскопа на ± 2000 гр.т. и полномасштабный диапазон акселерометра до ± 2 г.
Установите другие параметры
Здесь нам также необходимо настроить следующие параметры: отключить прерывания, отключить интерфейс AUX I2C, отключить FIFO, установить скорость отбора проб гироскопа и настройка цифрового фильтра с низким проходом (DLPF).Поскольку мы не используем прерывания для чтения данных в этой главе, функцию прерывания необходимо отключить.В то же время, поскольку мы не используем интерфейс AUX I2C для подключения других внешних датчиков, нам также необходимо закрыть этот интерфейс.Этими функциями можно управлять через регистр включения прерывания (0x38) и регистр управления пользователем (0x6a).MPU-6050 может использовать FIFO для хранения данных датчиков, но мы не использовали их в этой главе, поэтому все каналы FIFO должны быть закрыты.Это можно контролировать через регистр включения FIFO (0x23).По умолчанию значение этого регистра составляет 0 (то есть FIFO отключено), поэтому мы можем напрямую использовать значение по умолчанию.Скорость отбора проб гироскопа контролируется регистром распределения скорости отбора проб (0x19).Обычно мы устанавливаем эту скорость отбора проб на 50. Конфигурация цифрового фильтра с низким проходом (DLPF) завершается через регистр конфигурации (0x1a).Вообще говоря, мы установим DLPF на половину пропускной способности, чтобы сбалансировать точность данных и скорость отклика.
Настройка системного источника часов и включить датчик угловой скорости и датчик ускорения
Настройка системного источника часов зависит от регистра управления питанием 1 (0x6b), где самые низкие три бита этого регистра определяют выбор источника часов.По умолчанию эти три бита установлены на 0, что означает, что система использует внутренний генератор RC 8 МГц в качестве источника часов.Однако, чтобы повысить точность часов, мы часто устанавливаем его на 1 и выбираем PLL x-xysis gyroscope в качестве источника часов.Кроме того, включение датчика угловой скорости и датчика ускорения также является важным шагом в процессе инициализации.Обе операции реализованы через Регистр управления питанием 2 (0x6c).Просто установите соответствующий бит на 0, чтобы активировать соответствующий датчик.После завершения вышеуказанных шагов MPU-6050 может ввести нормальный рабочий статус.Те регистры, которые не являются специально установленными, примут значения по умолчанию, предварительно установленные системой.
Как работает MPU-6050?
Гироскоп датчик
Датчик оснащен гирозоном, который всегда останется параллельным начальному направлению из -за гироскопического эффекта.Следовательно, мы можем рассчитать направление и угол вращения, обнаружив отклонение гиропада от начального направления.
Датчик акселерометра
Датчик акселерометра - это устройство, которое может измерить ускорение, и он работает на основе принципа пьезоэлектрического эффекта.Во время ускорения датчик измеряет инерционную силу, применяемую к блоку массы, а затем вычисляет значение ускорения, используя второй закон Ньютона.
Цифровой процессор движения (DMP)
DMP-это модуль обработки данных в чипе MPU6050, который имеет встроенный алгоритм фильтрации фильтрации Калмана для получения данных от датчиков гироскопа и акселерометра и обработки выходных кватернионов.Эта функция значительно снижает рабочую нагрузку периферического микропроцессора и избегает утомительной фильтрации и процесса слияния данных.
Примечания:
Кватернионы: кватернионы - это простые номера суперкомплекса.Комплексные числа состоят из реальных чисел плюс воображаемая единица I, где i^2 = -1.
Где используется MPU-6050?
• Игрушки
• Провертет и портативные игры
• Игровые контроллеры на основе движения
• Технология Blurfree ™ (для стабилизации видео/неподвижного изображения)
• Технология AirSign ™ (для безопасности/аутентификации)
• Распознавание жестов Instantgesture ™ IG ™
• Носимые датчики для здоровья, фитнеса и спорта
• Структура игры и применения с поддержкой движения
• Технология MotionCommand ™ (для жестов коротких вырезанных)
• Основанные на местоположении услуги, интересующие точки и мертвые расчеты
• 3D-пульт дистанционного управления для подключенных к Интернету DTVS и Settop Lope, 3D мышей
• Технология Touchanywhere ™ (для управления/навигацией приложений для пользовательского интерфейса «No Touch»)
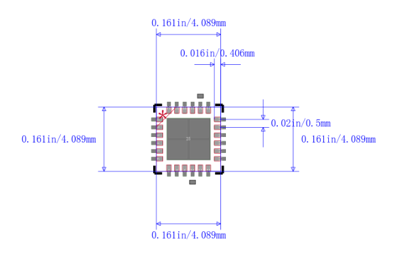
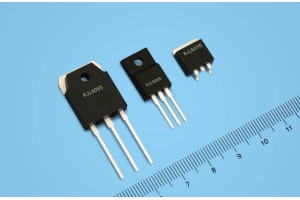
Пакет MPU-6050
Как уменьшить шум MPU-6050?
Мы можем взять следующие способы уменьшить шум MPU-6050:
Используйте калиброванные датчики: калибровка акселерометра и гироскоп MPU-6050 может устранить смещение и ошибку самих датчиков, тем самым уменьшая эффект шума.Процесс калибровки обычно состоит из двух этапов: статической калибровки и калибровки движения.
Процесс аппаратной фильтрации: Добавление конденсаторов фильтров в линию электропередачи MPU-6050 может снизить влияние шума питания на датчик.Между тем, во время макета печатной платы мы должны попытаться удержать MPU-6050 вдали от потенциальных источников интерференции, таких как высокочастотные сигнальные линии и мощные компоненты.
Обработка программной фильтрации: После сбора необработанных данных из MPU-6050 мы можем добавить ссылку на программную фильтрацию для предварительного обработки начальных данных для устранения индуцированных шума интерференции.Обычно используемые методы программного фильтрации включают среднюю фильтрацию, медианную фильтрацию, фильтрацию Калмана и так далее.
Используйте внутренний фильтр с низким уровнем частоты: MPU-6050 имеет внутренний интегрированный цифровой фильтр с низким уровнем частоты, который можно использовать для снижения высокочастотного шума путем установки частоты отсечения.В частности, мы можем установить частоту отсечения цифрового фильтра, изменяя реестр конфигурации MPU-6050 для устранения высокочастотного шума, вызванного выборкой A/D.
Расчет движения на основе MPU-6050
MPU-6050 представляет собой шестиосный акселерометр и датчик гироскопа, который можно использовать для измерения движения и отношения объектов.Расчет траектории движения на основе MPU-6050 может быть реализован следующими шагами:
Первый шаг - прочитать данные датчика.Нам необходимо прочитать данные об акселерометре и гироскопа от датчиков MPU-6050, используя соответствующие драйверы и библиотечные функции.Эти данные обычно выводятся в цифровом формате, поэтому для преобразования их в фактических измерениях в физических единицах требуется некоторые работы по конверсии и калибровке.
Второй шаг - рассчитать ускорение.Во -первых, нам нужно обработать данные из акселерометра, чтобы получить ускорение объекта в каждой оси.Впоследствии, чтобы рассчитать скорость и смещение объекта в каждой оси, нам необходимо интегрировать данные о ускорении.Методы численной интеграции, такие как метод Эйлера или метод Lunger-Kutta, часто используются в этом процессе для обеспечения точности расчетов смещения.
Третий шаг - рассчитать угловую скорость.Используя данные гироскопа, угловая скорость объекта может быть рассчитана.Опять же, эти данные должны быть откалиброваны и преобразованы для получения угловой скорости в реальных физических единицах.
Четвертый шаг - рассчитать вращение.Интегрируя данные угловой скорости, может быть рассчитана угол вращения объекта в каждой оси.Это можно сделать с использованием методов численной интеграции, таких как метод Эйлера или метод Longe-Kutta для расчета угла.
Пятый шаг - объединить данные.Мы объединяем данные от акселерометров и гироскопов, чтобы получить полную информацию об отношении и позиции объекта.Это можно сделать с помощью алгоритмов, таких как решатель отношений на основе кватерниона или угла Euler Engle.
Шестой шаг - визуализация результатов.Мы преобразуем вычисленную траекторию движения объекта в набор точек в 3D -системе координат и отображаем ее с использованием соответствующих инструментов визуализации для более интуитивного понимания траектории движения объекта и изменений отношения.
Часто задаваемые вопросы [FAQ]
1. Насколько точно MPU6050?
Приобретенные результаты показали достаточную точность менее 1 % и надежности, обеспечивая надлежащие размеры вала лифта и высокие стандарты лифта.
2. Как прочитать данные из MPU6050?
Чтобы прочитать внутренние регистры MPU6050, Master отправляет начало условия, за которым следует подчиненный адрес I2C и бит записи, а затем адрес регистра, который будет прочитан.
3. Где используется MPU6050?
В носимых отслеживания здоровья, фитнес-отслеживания устройств.В беспилотниках и квадрокоптерах MPU6050 используется для управления позицией.Используется в управлении роботизированной рукой.Устройства управления жестами рук.
4. MPU6050 - ИМУ?
Блок датчика IMU MPU6050 считывает данные от датчика MPU-6050, который подключен к аппаратному обеспечению.Блок выходы ускорения, угловой скорости и температуры вдоль осей датчика.
5. Какова обработка MPU6050?
Это бортовой процессор MPU6050, который объединяет данные, поступающие от акселерометра и гироскопа.DMP является ключом к использованию MPU6050 и подробно объясняется позже.Как и во всех микропроцессорах, DMP нуждается в прошивке для работы.
О нас
ALLELCO LIMITED
Прочитайте больше
Быстрое запрос
Пожалуйста, отправьте запрос, мы ответим немедленно.

Углубленное руководство по LM317: понимание регулируемых регуляторов напряжения
на 2024/09/3
Понимание TL431: всеобъемлющее руководство по регуляторам точности шунта
на 2024/09/3
Популярные посты
-
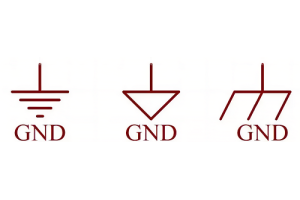
Что такое GND в цепи?
на 1970/01/1 3108
-

Руководство по разъемам RJ-45: Цветовые коды разъема RJ-45, схемы проводки, приложения R-J45, листы RJ-45
на 1970/01/1 2672
-
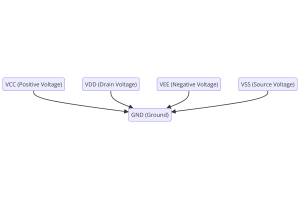
Понимание напряжений питания в электронике VCC, VDD, VEE, VSS и GND
на 0400/11/15 2211
-

Типы разъемов волокна: SC VS LC и LC VS MTP
на 1970/01/1 2182
-

Сравнение DB9 и RS232
на 1970/01/1 1802
-

Что такое батарея LR44?
Электричество, эта вездесущая сила, тихо пронизывает все аспекты нашей повседневной жизни, от тривиальных гаджетов до опасного для жизни медицинского оборудования, он играет тихую роль.Тем не менее, по -настоящему ухв...на 1970/01/1 1774
-
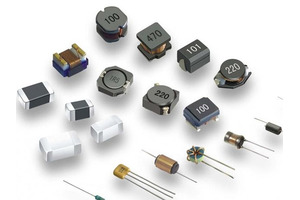
Понимание основ: сопротивление индуктивности, и успеваемость
В запутанном танце электротехники трио фундаментальных элементов занимает центральное место: индуктивность, сопротивление и емкость.Каждый носит уникальные черты, которые определяют динамические ритмы электронных ...на 1970/01/1 1728
-

Комплексное руководство по батарее CR2430: Технические характеристики, применения и сравнение с батареями CR2032
Что такое батарея CR2430?Преимущества батарей CR2430НормCR2430 Аккумуляторные приложенияCR2430 эквивалентCR2430 против CR2032Батарея CR2430 РазмерЧто искать при покупке CR2430 и эквивалентахЛист данных PDFЧасто задаваемые вопросы Батареи ...на 1970/01/1 1674
-
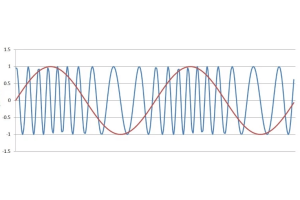
Что такое RF и почему мы его используем?
Технология радиочастотной (RF) является ключевой частью современной беспроводной связи, что позволяет передавать данные на большие расстояния без физических соединений.Эта статья углубляется в основы РФ, объясняя, ка...на 1970/01/1 1670
-
Комплексное руководство по HFE в транзисторах
Транзисторы являются важными компонентами в современных электронных устройствах, что позволяет усилить и контроль сигнала.Эта статья углубляется в знания, окружающие HFE, включая то, как выбрать значение HFE транзистор...на 5600/11/15 1632
Горячий номер детали
-

MJD31CRLG
onsemi
TRANS NPN 100V 3A DPAK
BA6238AN
Rohm Semiconductor
IC MOTOR DRIVER 8V-18V 10SIP
HCF40109BEY
STMicroelectronics
IC TRANSLTR UNIDIRECTIONAL 16DIP
BSS79C
onsemi
TRANS NPN 40V 0.8A SOT23-3
SN74LVTH540PWR
Texas Instruments
IC BUFFER INVERT 3.6V 20TSSOP
BSC883N03LSG
Infineon Technologies
N-CHANNEL POWER MOSFET
2331211-2
TE Connectivity AMP Connectors
2331211-2
IR533C
Everlight Electronics Co Ltd
EMITTER IR 940NM 100MA RADIAL
MC34072ADR2
onsemi
IC OPAMP JFET 2 CIRCUIT 8SOIC
AT34C02-10TI-2.7
Microchip Technology
IC EEPROM 2KBIT I2C 8TSSOP
M41ST87WSS6F
STMicroelectronics
IC RTC CLK/CALENDAR I2C 20SSOP
RT0402DRD071K2L
YAGEO
RES SMD 1.2K OHM 0.5% 1/16W 0402
PM15CZF120
Powerex Inc.
MOD IPM 6PAC 1200V 15A
LC4128V-75T144I
Lattice Semiconductor Corporation
IC CPLD 128MC 7.5NS 144TQFP
ILC6383CIRADJX
onsemi
IC REG BOOST ADJUSTABLE 1A 8MSOP
NSBC124EPDXV6T5
onsemi
SMALL SIGNAL BIPOLAR TRANSISTOR
37012000000
Littelfuse Inc.
FUSE BOARD MOUNT 2A 250VAC RAD
LM2594HVN-3.3
Texas Instruments
IC REG BUCK 3.3V 500MA 8DIP -

REF3240AMDBVREP
Texas Instruments
IC VREF SERIES 0.2% SOT23-6
LM336MX-2.5
Texas Instruments
IC VREF SHUNT 4% 8SOIC
MSP430F5244IRGZR
Texas Instruments
IC MCU 16BIT 128KB FLASH 48VQFN
GRM1555C1E1R6BZ01D
Murata Electronics
CAP CER 1.6PF 25V C0G/NP0 0402
STFW12N120K5
STMicroelectronics
MOSFET N-CH 1200V 12A ISOWATT
KS10-12
TDK-Lambda Americas Inc
AC/DC CONVERTER 12V 10W
RT0805FRD0710KL
YAGEO
RES SMD 10K OHM 1% 1/8W 0805
AT86RF233-ZU
Microchip Technology
IC RF TXRX+MCU 802.15.4 32VFQFN
MP18024HN-LF-Z
Monolithic Power Systems Inc.
IC GATE DRVR HALF-BRIDGE 8SOIC
AT45DB011B-CI
Microchip Technology
IC FLASH 1MBIT SPI 20MHZ 9CBGA
ADV7520NKBBCZ-80
Analog Devices Inc.
IC VIDEO TRANSMITTER 76CSPBGA
AR0234CSSC28SUKA0-CP
onsemi
2MP 1/3 CIS SO
CGA6M2X7R2A105M200AA
TDK Corporation
CAP CER 1UF 100V X7R 1210
GBPC1510W
Diodes Incorporated
BRIDGE RECT 1PH 1KV 15A GBPC-W
GRM42A7U3F820JW31L
Murata Electronics
CAP CER 82PF 3.15KV U2J 1808
GRM033R71E331KA01D
Murata Electronics
CAP CER 330PF 25V X7R 0201
CLB1108-4-50TR-R
Eaton - Electronics Division
FIXED IND 200NH 0.28 MOHM SMD
LP87332BRHDRQ1
Texas Instruments
IC REG QUAD BUCK/LNR 2MHZ 28VQFN -

PXLS60322AESR2
NXP USA Inc.
XTRINSIC 2 AXIS MED/MED XY ACCEL
CL21C300JBANNNC
Samsung Electro-Mechanics
CAP CER 30PF 50V C0G/NP0 0805
SS5P6-M3/86A
Vishay General Semiconductor - Diodes Division
DIODE SCHOTTKY 60V 5A TO277A
W631GG6KB15I
Winbond Electronics
IC DRAM 1GBIT PAR 96WBGA
NRH3010T2R2MN
Taiyo Yuden
FIXED IND 2.2UH 1.3A 99.6MOHM SM
CSD25213W10
Texas Instruments
MOSFET P-CH 20V 1.6A 4DSBGA
MRF8S9202NR3
Freescale Semiconductor
RF ULTRA HIGH FREQUENCY BAND, N-
MC3302D
onsemi
IC COMPARATOR 14SOIC
HMC566
Analog Devices Inc.
IC RF AMP VSAT 29GHZ-36GHZ DIE
C1005X7R1V224K050BC
TDK Corporation
CAP CER 0.22UF 35V X7R 0402
MM3Z6V2C
Fairchild Semiconductor
ZENER DIODE, 6.2V, 5%, 0.2W, UNI
SM5S28A-E3/2D
Vishay General Semiconductor - Diodes Division
TVS DIODE 28VWM 45.4VC DO218AB
SKY77344-21
Skyworks Solutions Inc.
IC AMP CEL 824MHZ 880MHZ 20MCM
PCI8412ZHK
Texas Instruments
IC INTEGRATED FLASHMEDIA 216-BGA
ADV7123JSTZ240
Analog Devices Inc.
IC DAC 10BIT A-OUT 48LQFP
C8051F500-IMR
Silicon Labs
IC MCU 8BIT 64KB FLASH 48QFN
GRM1885C2A680GA01J
Murata Electronics
CAP CER 68PF 100V C0G/NP0 0603
VNQ600A13TR
STMicroelectronics
IC PWR DRIVER N-CHANNEL 1:1 28SO